Outside of Dash, I'm the only one in our club that currently has plans to make his droid a 2-3-2 (an R2 that transitions from two legs, to three legs, and back to two legs); so I had to devise a way to keep the outer legs 1/2" away from the R2's body while still allowing the legs to rotate. I decided to use two pieces of 1/8" in HDPE plastic (self lubricating) in the shoulders rather than using a bearing and fill the gap between the shoulders and the two pieces of HDPE with wood that is the needed thickness.
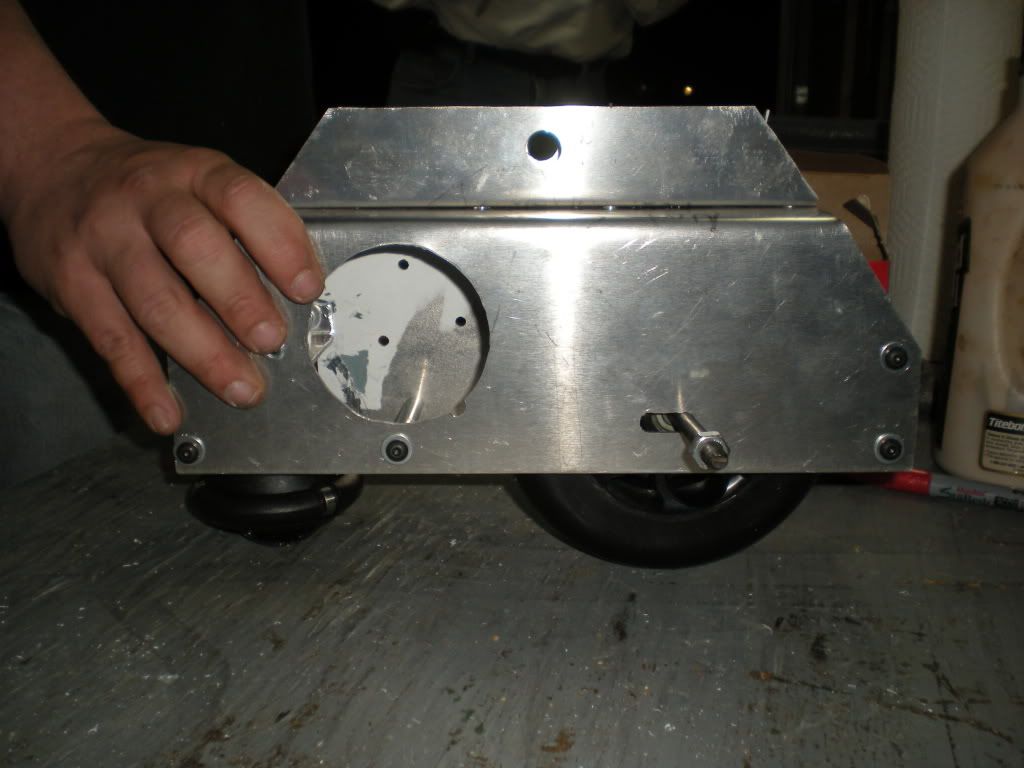
Cutting the 1/8" HDPE to attach flush to each side of the frame uprights.


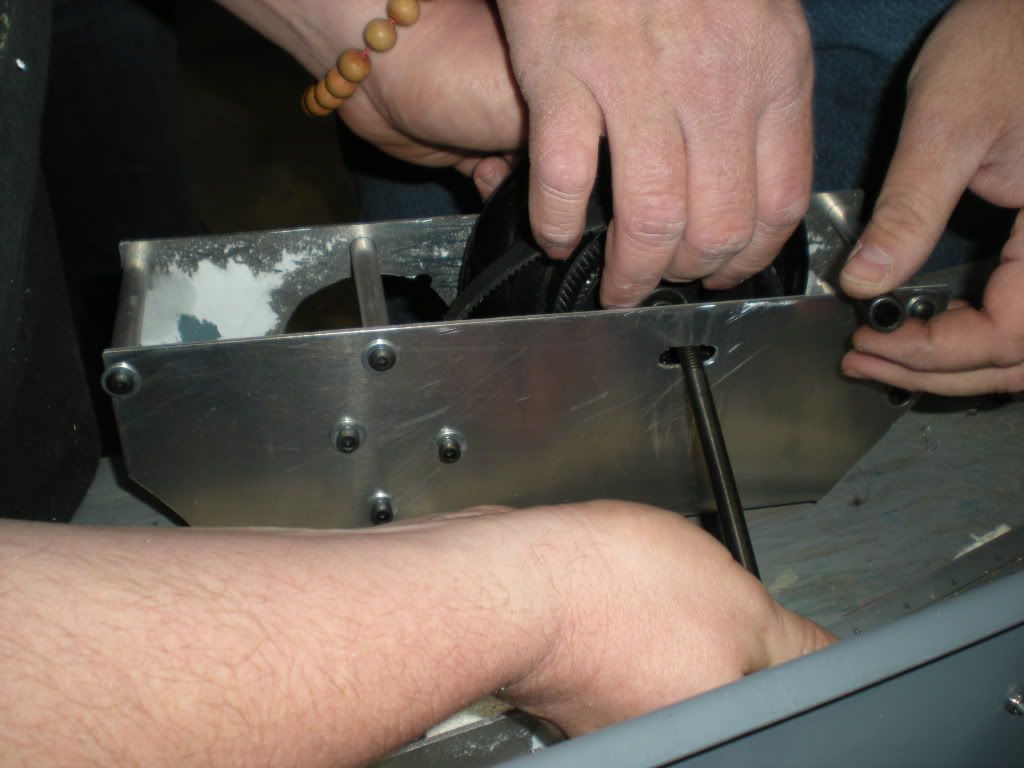
Drilled a 1 3/8" hole in the HDPE from the inside of the frame to make sure it was centered.

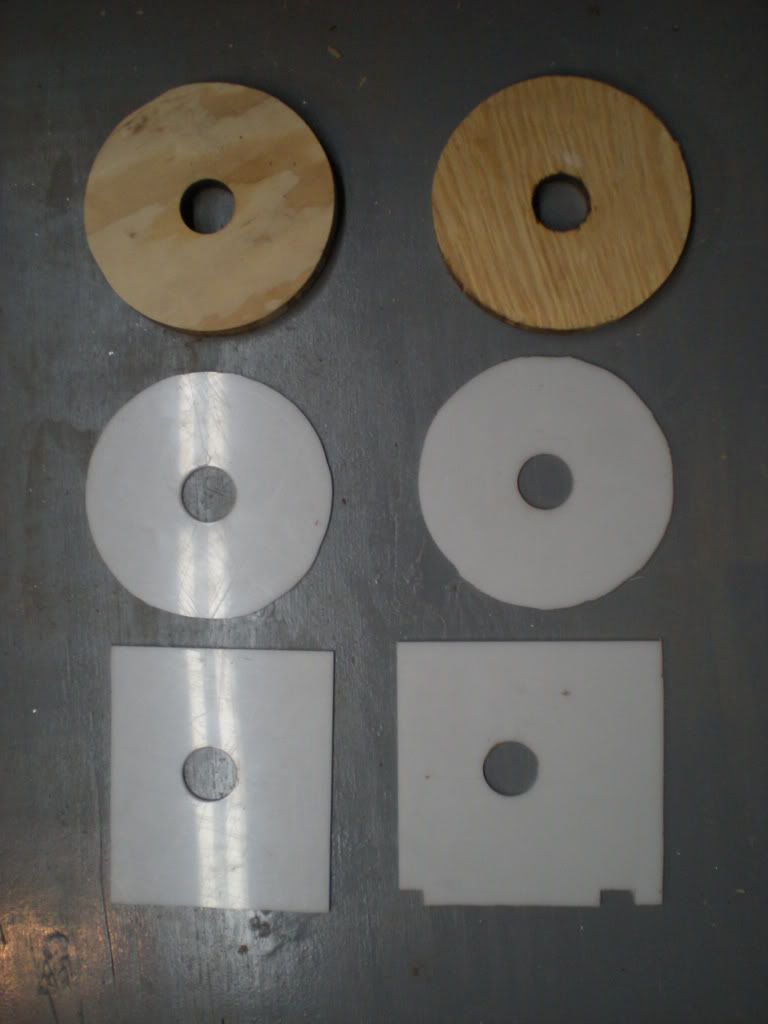
I drew extra circles the correct size on some 3/4" plywood, Clay helped me cut them out on the band saw, and we took turns using the hole saw to cut the center out of the shoulder spacer wood. When these pieces are finished, they will have one side routed/drilled out so it covers the leg bracket and hex bolt heads and sits flush against the existing 3/4" wood attached to the outer legs.



All the cut shoulder pieces so far.
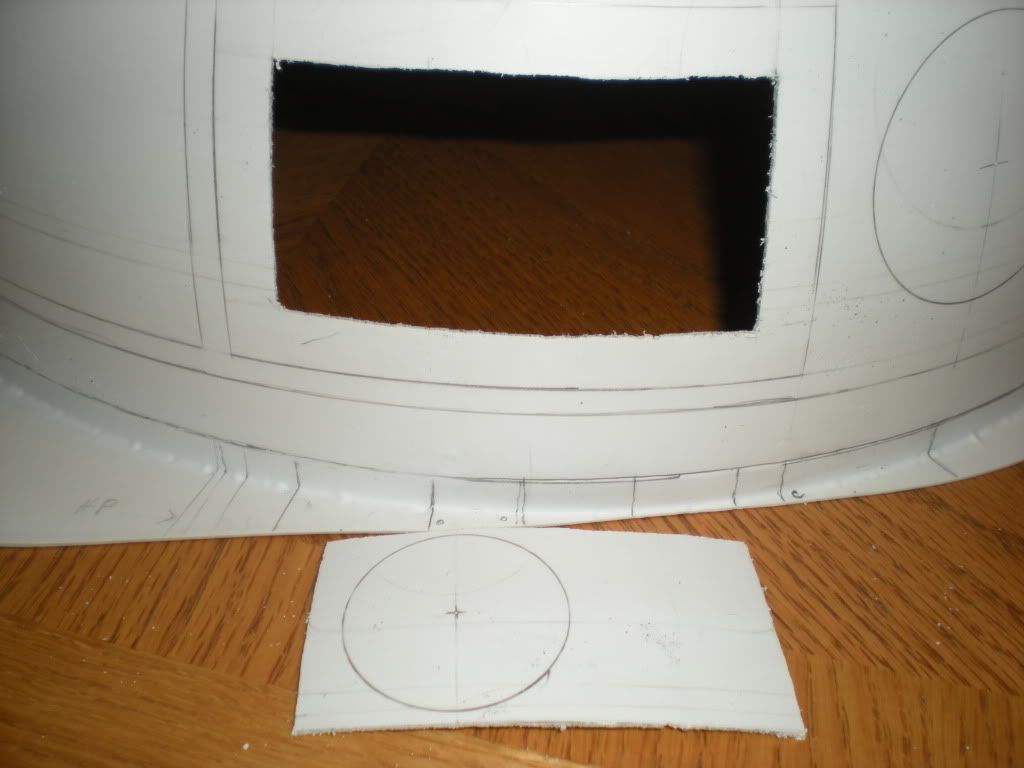
This is how the pieces will sit on the shoulder. I still have to add another filler piece, but I'm going to wait until I get this 3/4" plywood routed/drilled to hide the shoulder hardware.